Publications
-
Watching Grass Grow: Long-term Visual Navigation and Mission Planning for Autonomous Biodiversity Monitoring
M. Gadd, D. De Martini, L. Pitt, W. Tubby, M. Towlson, C. Prahacs, O. Bartlett, J. Jackson, M. Qi, P. Newman, A. Hector, R. Salguero-Gómez, N. Hawes
IEEE International Conference on Robotics and Automation (ICRA), Workshop on Field Robotics, 2024
[PDF]@article{gadd2024watching, title={{Watching Grass Grow: Long-term Visual Navigation and Mission Planning for Autonomous Biodiversity Monitoring}}, author={Gadd, Matthew and De Martini, Daniele and Pitt, Luke and Tubby, Wayne and Towlson, Matthew and Prahacs, Chris and Bartlett, Oliver and Qi, Man and Newman, Paul and Hector, Andrew and Salguero-G\'omez, Roberto and Hawes, Nick}, journal={arXiv preprint arXiv:2404.10446}, year=2024 }
-
VDNA-PR: Using General Dataset Representations for Robust Sequential Visual Place Recognition
B. Ramtoula, D. De Martini, M. Gadd, P. Newman
IEEE International Conference on Robotics and Automation (ICRA), 2024
[PDF]@article{ramtoula2024icra, title={{VDNA-PR: Using General Dataset Representations for Robust Sequential Visual Place Recognition}}, author={Ramtoula, Benjamin and De Martini, Daniele and Gadd, Matthew and Newman, Paul}, journal={arXiv preprint arXiv:2403.09025}, year=2024 }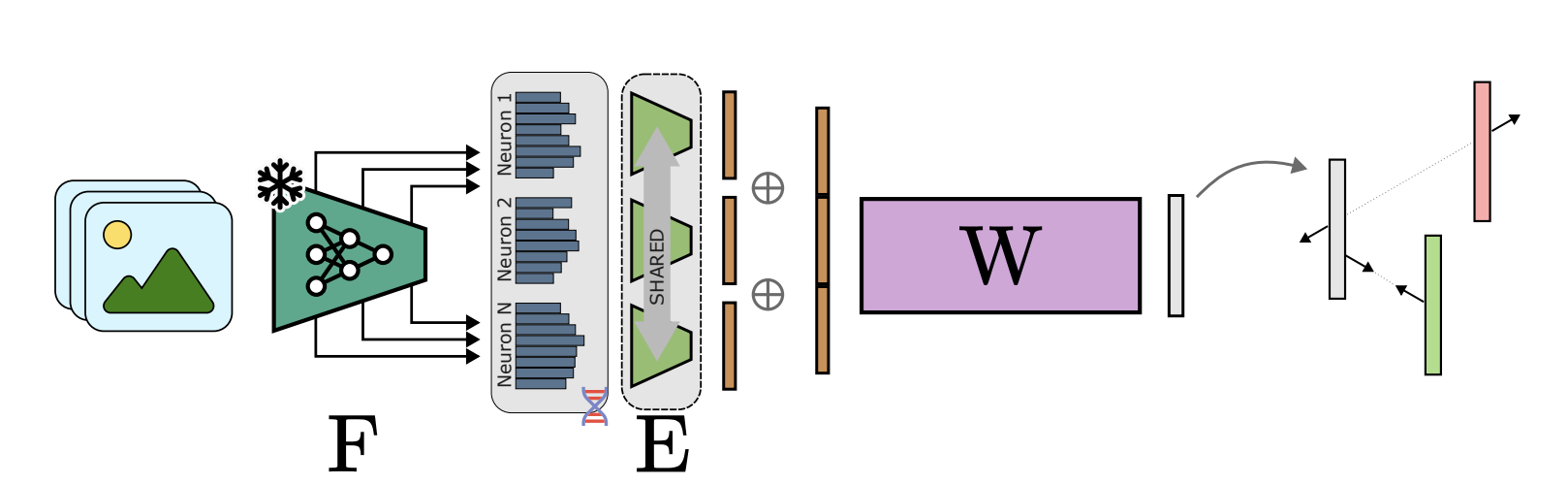
-
That’s My Point: Compact Object-centric LiDAR Pose Estimation for Large-scale Outdoor Localisation
G. Pramatarov, M. Gadd, P. Newman and D. De Martini
IEEE International Conference on Robotics and Automation (ICRA), 2024
[PDF]@article{pramatarov2024icra, title={{That's My Point: Compact Object-centric LiDAR Pose Estimation for Large-scale Outdoor Localisation}}, author={Pramatarov, Georgi and Gadd, Matthew and Newman, Paul and De Martini, Daniele}, journal={arXiv preprint arXiv:2403.04755}, year=2024 }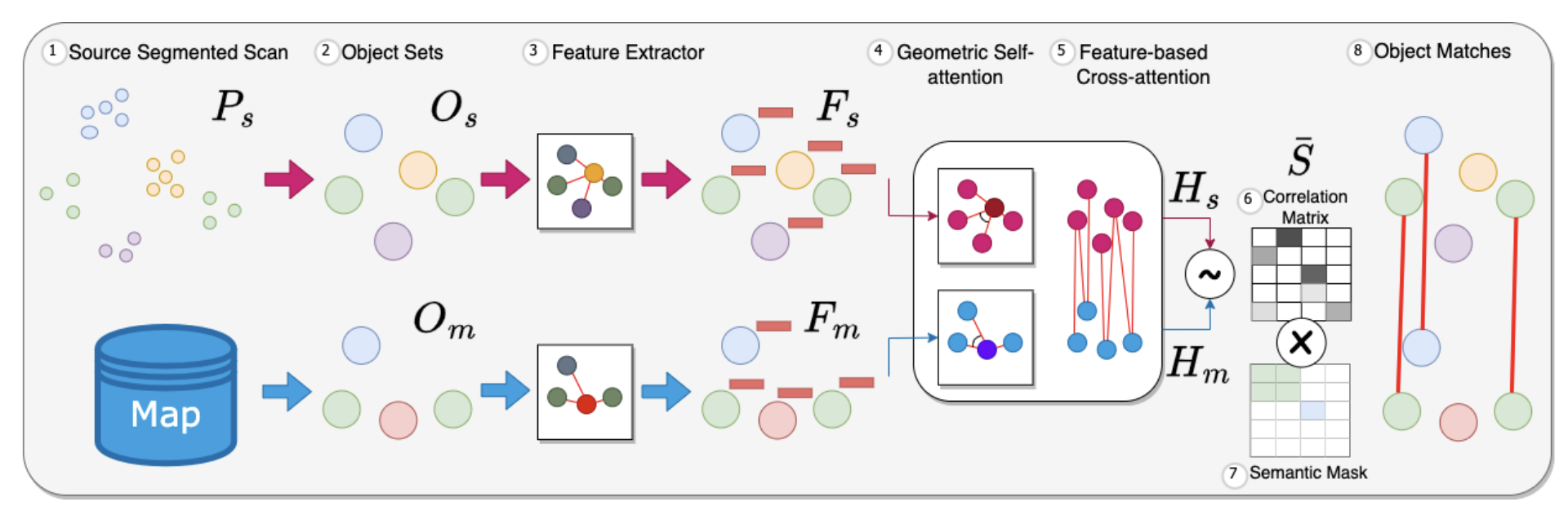
-
OORD: The Oxford Offroad Radar Dataset
M. Gadd, D. De Martini, O. Bartlett, P. Murcutt, M. Towlson, M. Widojo, V. Muşat, L. Robinson, E. Panagiotaki, G. Pramatarov, M. A. Kühn, L. Marchegiani, P. Newman, L. Kunze
arXiv preprint arXiv:2403.02845, 2024
[PDF]@article{gadd2023oord, title={{OORD: The Oxford Offroad Radar Dataset}}, author={Gadd, Matthew and De Martini, Daniele and Bartlett, Oliver and Murcutt, Paul and Towlson, Matt and Widojo, Matthew and Mu\cb{s}at, Valentina and Robinson, Luke and Panagiotaki, Efimia and Pramatarov, Georgi and K"{u}hn, Marc Alexander and Marchegiani, Letizia and Newman, Paul and Kunze, Lars}, journal={arXiv preprint arXiv:2403.02845}, year=2024 }
-
Masked $\gamma$-SSL: Learning Uncertainty Estimation via Masked Image Modeling
D. S. W. Williams, M. Gadd, P. Newman and D. De Martini
IEEE International Conference on Robotics and Automation (ICRA), 2024
[PDF]@article{williams2024icra, title={{Masked $\gamma$-SSL: Learning Uncertainty Estimation via Masked Image Modeling}}, author={Williams, David S. W. and Gadd, Matthew and Newman, Paul and De Martini, Daniele}, journal={arXiv preprint arXiv:2402.17622}, year=2024 }
-
Mitigating Distributional Shift in Semantic Segmentation via Uncertainty Estimation from Unlabelled Data
D. S. W. Williams, D. De Martini, M. Gadd, and P. Newman
IEEE Transactions on Robotics (T-RO), 2024
[PDF]@article{williams2024mitigating, title={{Mitigating Distributional Shift in Semantic Segmentation via Uncertainty Estimation from Unlabelled Data}}, author={Williams, David S. W. and De Martini, Daniele and Gadd, Matthew and Newman, Paul}, journal={arXiv preprint arXiv:2402.17653}, year={2024} }
-
RAG-Driver: Generalisable Driving Explanations with Retrieval-Augmented In-Context Learning in Multi-Modal Large Language Model
J. Yuan, S. Sun, D. Omeiza, B. Zhao, P. Newman, L. Kunze, M. Gadd
arXiv preprint arXiv:2402.10828, 2024
[PDF]@article{yuan2024ragdriver, title={{RAG-Driver: Generalisable Driving Explanations with Retrieval-Augmented In-Context Learning in Multi-Modal Large Language Model}}, author={Yuan, Jianhao and Sun, Shuyang and Omeiza, Daniel and Zhao, Bo and Newman, Paul and Kunze, Lars and Gadd, Matthew}, journal={arXiv preprint arXiv:2402.10828}, year={2024} }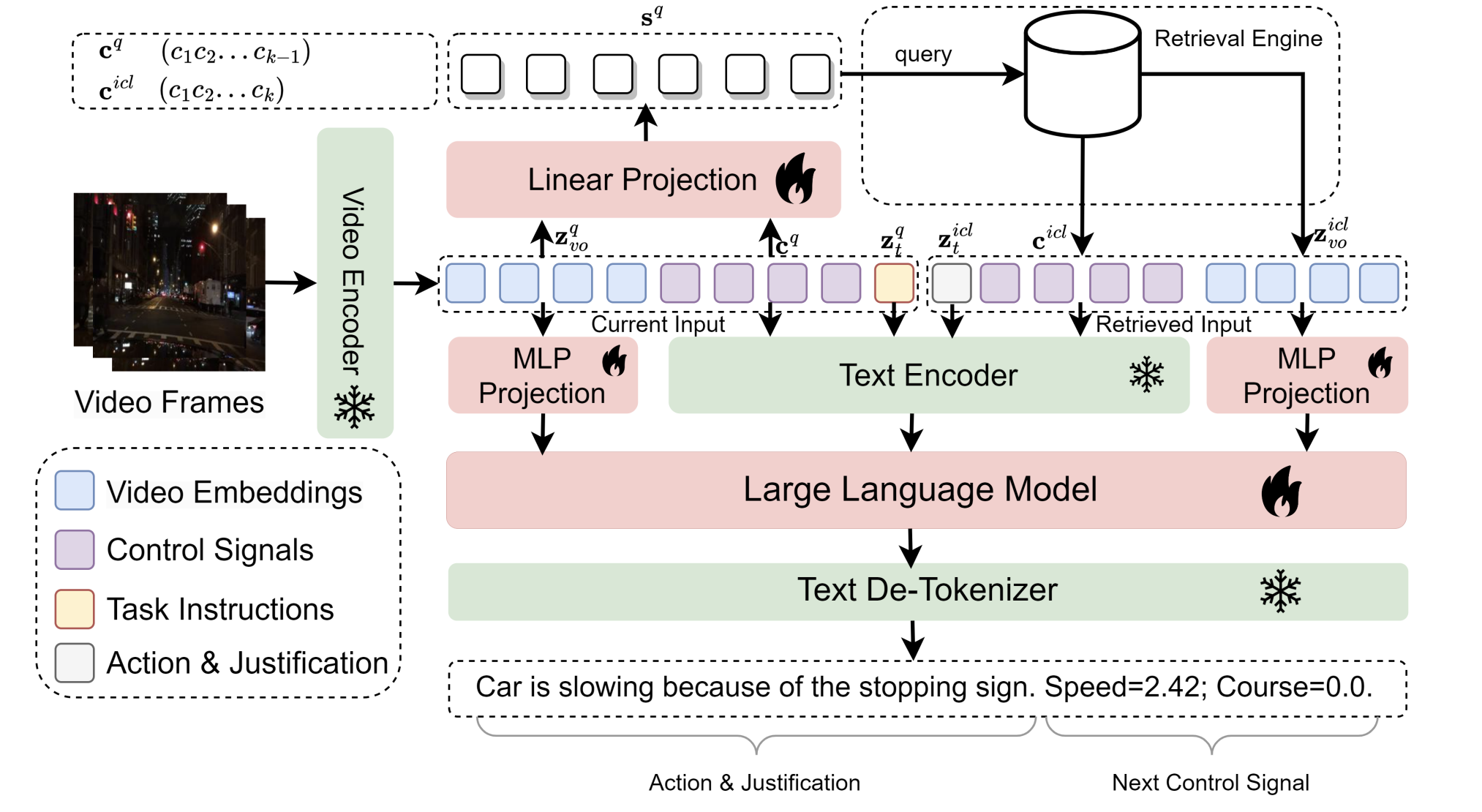
-
Open-RadVLAD: Fast and Robust Radar Place Recognition
M. Gadd, P. Newman
IEEE Radar Conference (RadarConf), 2024
[PDF]@inproceedings{gadd2024radvlad, title={{Open-RadVLAD: Fast and Robust Radar Place Recognition}}, author={Gadd, Matthew and Newman, Paul}, booktitle={IEEE Radar Conference (RadarConf)}, year={2024} }
-
NeuralFloors: Conditional Street-Level Scene Generation From BEV Semantic Maps Via Neural Fields
V. Musat, D. De Martini, M. Gadd, P. Newman
IEEE Robotics and Automation Letters (RA-L), 2024
[PDF]@inproceedings{musat2024ral, title={{NeuralFloors: Conditional Street-Level Scene Generation From BEV Semantic Maps Via Neural Fields}}, author={Musat, Valentina and De Martini, Daniele and Gadd, Matthew and Newman, Paul}, booktitle={IEEE Robotics and Automation Letters (RA-L)}, year={2024} }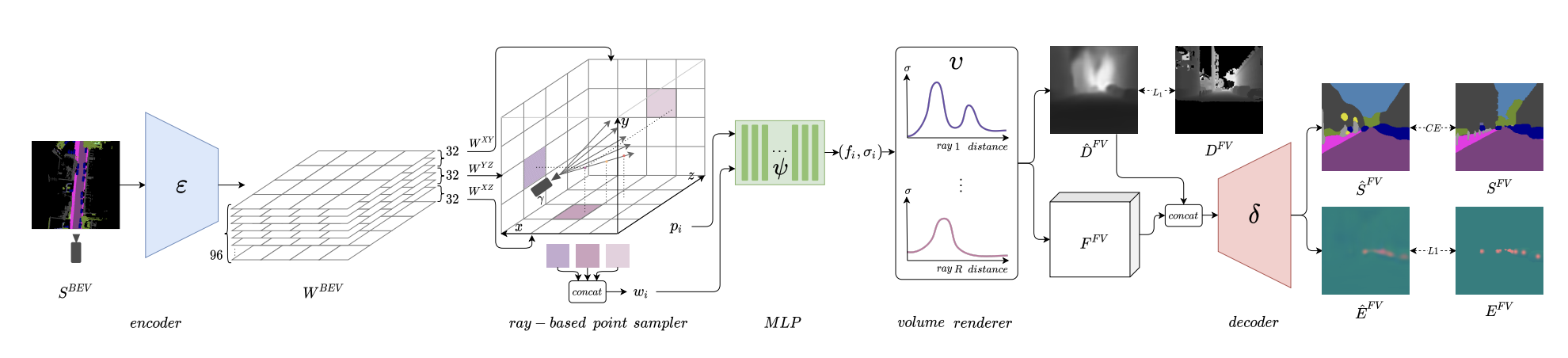
-
What you see is what you get: Experience ranking with deep neural dataset-to-dataset similarity for topological localisation
M. Gadd, B. Ramtoula, D. De Martini, P. Newman
Proceedings of the International Symposium on Experimental Robotics (ISER), 2023
[PDF]@inproceedings{gadd2023iser, title={{What you see is what you get: Experience ranking with deep neural dataset-to-dataset similarity for topological localisation}}, author={Gadd, Matthew and Ramtoula, Benjamin and De Martini, Daniele and Newman, Paul}, booktitle={International Symposium on Experimental Robotics (ISER)}, year={2023} }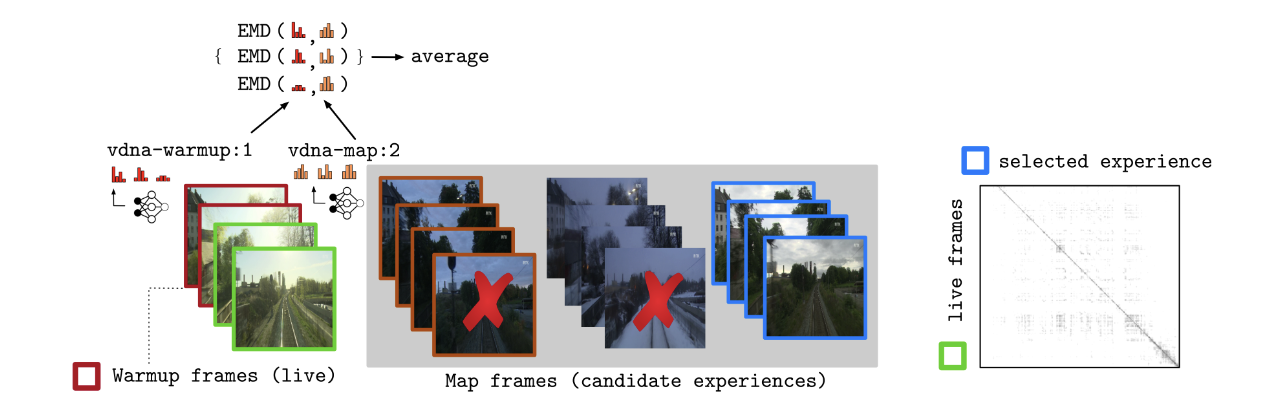
-
Robot-Relay: Building-Wide, Calibration-Less Visual Servoing with Learned Sensor Handover Networks
L. Robinson, M. Gadd, P. Newman, D. De Martini
Proceedings of the International Symposium on Experimental Robotics (ISER), 2023
[PDF]@inproceedings{robinson2023iser, title={{Robot-Relay: Building-Wide, Calibration-Less Visual Servoing with Learned Sensor Handover Networks}}, author={Robinson, Luke and Gadd, Matthew and Newman, Paul and De Martini, Daniele}, booktitle={International Symposium on Experimental Robotics (ISER)}, year={2023} }
-
LROC-PANGU-GAN: Closing the Simulation Gap in Learning Crater Segmentation with Planetary Simulators
J. La, J. Phadke, M. Hutton, M. Schwinning, G. De Canio, F. Renk, L. Kunze and M. Gadd
Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), 2023
[PDF]@inproceedings{la2023astra, title={{LROC-PANGU-GAN: Closing the Simulation Gap in Learning Crater Segmentation with Planetary Simulators}}, author={La, Jaewon and Phadke, Jamie and Hutton, Matt and Schwinning, Marius and De Canio, Gabriele and Renk, Florian and Kunze, Lars and Gadd, Matthew}, booktitle = {Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA)}, year = {2023} }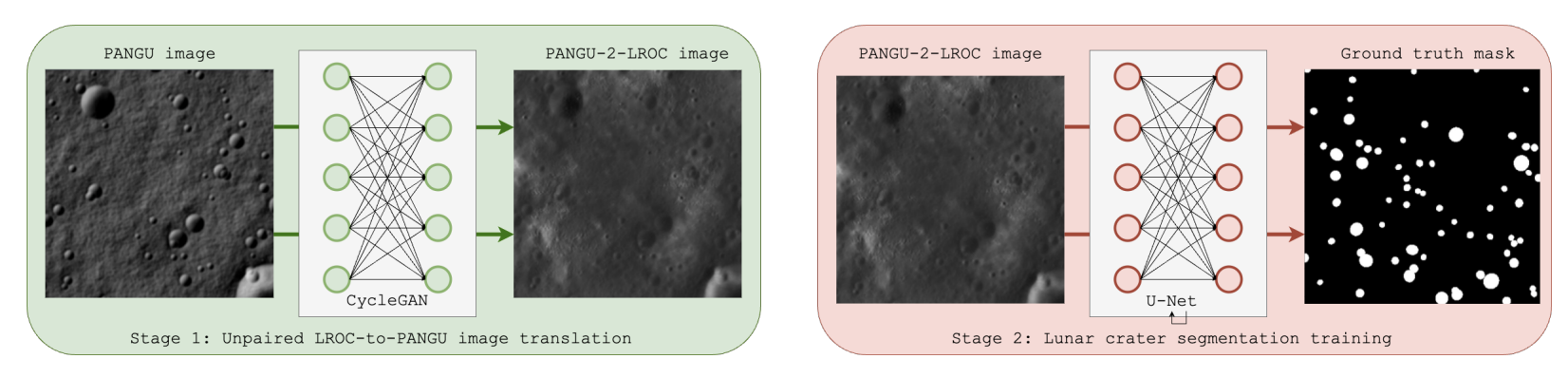
-
SEM-GAT: Explainable Semantic Pose Estimation using Learned Graph Attention
E. Panagiotaki, D. De Martini, G. Pramatarov, M. Gadd, L. Kunze
International Conference on Advanced Robotics (ICAR), 2023
[PDF]@inproceedings{panagiotaki2023semgat, title={{SEM-GAT: Explainable Semantic Pose Estimation using Learned Graph Attention}}, author={Panagiotaki, Efimia and De Martini, Daniele and Pramatarov, Georgi and Gadd, Matthew and Kunze, Lars}, booktitle = {International Conference on Advanced Robotics (ICAR)}, year = {2023} }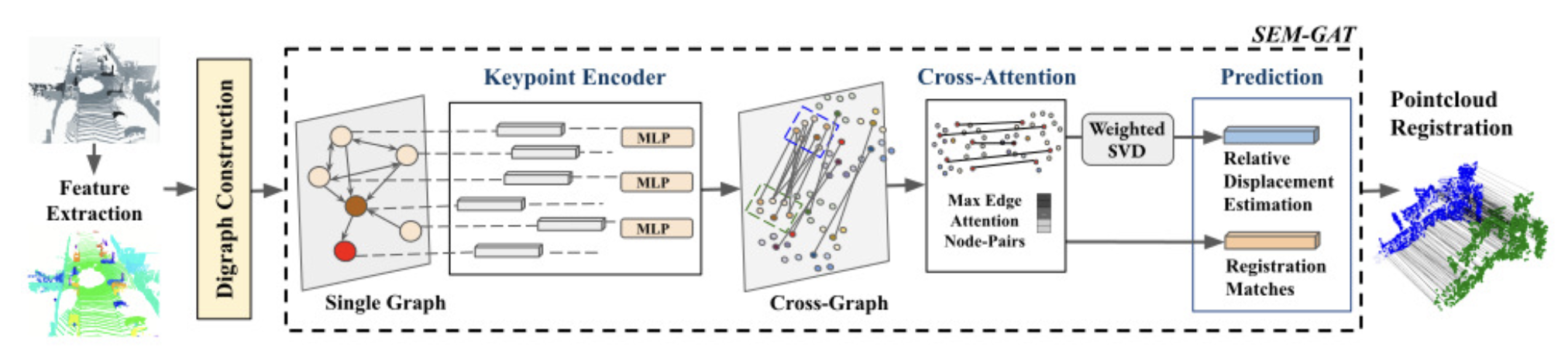
-
Off the Radar: Uncertainty-Aware Radar Place Recognition with Introspective Querying and Map Maintenance
J. Yuan, P. Newman, and M. Gadd
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
[PDF]@inproceedings{yuan2023iros, title={{Off the Radar: Variational Uncertainty-Aware Unsupervised Radar Place Recognition for Introspective Querying and Map Maintenance}}, author={Yuan, Jianhao and Newman, Paul and Gadd, Matthew}, booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)} }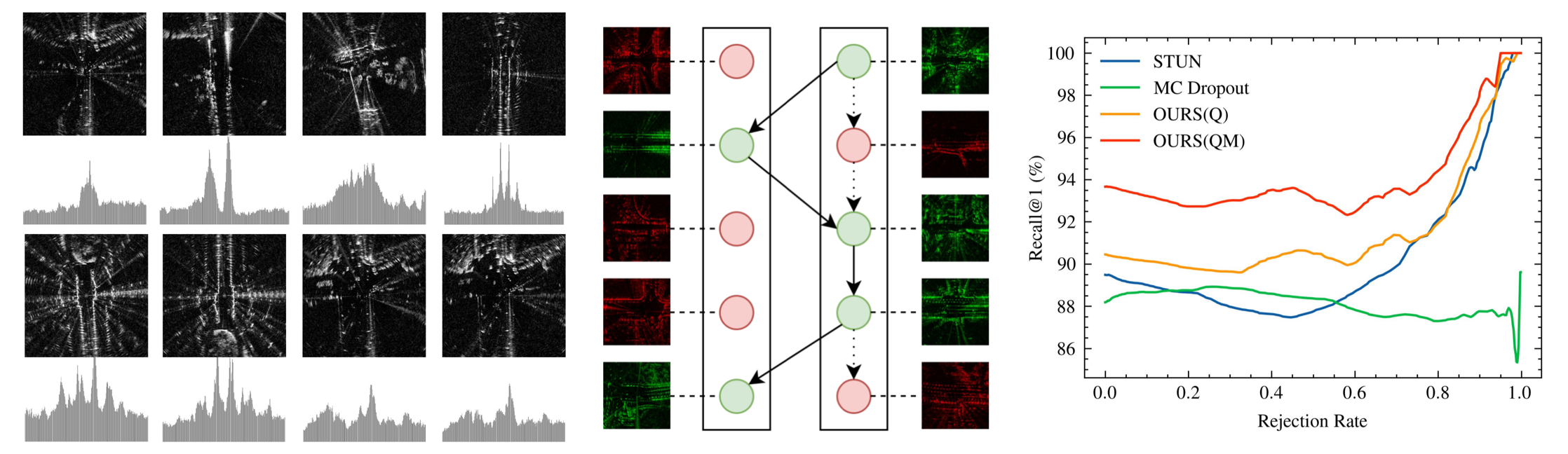
-
Visual Servoing on Wheels: Robust Robot Orientation Estimation in Remote Viewpoint Control
L. Robinson, D. De Martini, M. Gadd, and P. Newman
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
[PDF]@inproceedings{robinson2023iros, title={{Visual Servoing on Wheels: Robust Robot Orientation Estimation in Remote Viewpoint Control}}, author={Robinson, Luke and De Martini, Daniele and Gadd Matthew and Newman, Paul}, booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)} }
-
Visual DNA: Representing and Comparing Images using Distributions of Neuron Activations
B. Ramtoula, M. Gadd, P. Newman, and D. De Martini
IEEE International Conference on Computer Vision (CVPR), 2023.
[PDF]@inproceedings{ramtoula2023cvpr, title={{Visual DNA: Representing and Comparing Images using Distributions of Neuron Activations}}, author={Ramtoula, Benjamin and Gadd, Matthew and Newman, Paul and De Martini, Daniele}, booktitle={IEEE International Conference on Computer Vision (CVPR)}, year={2023} }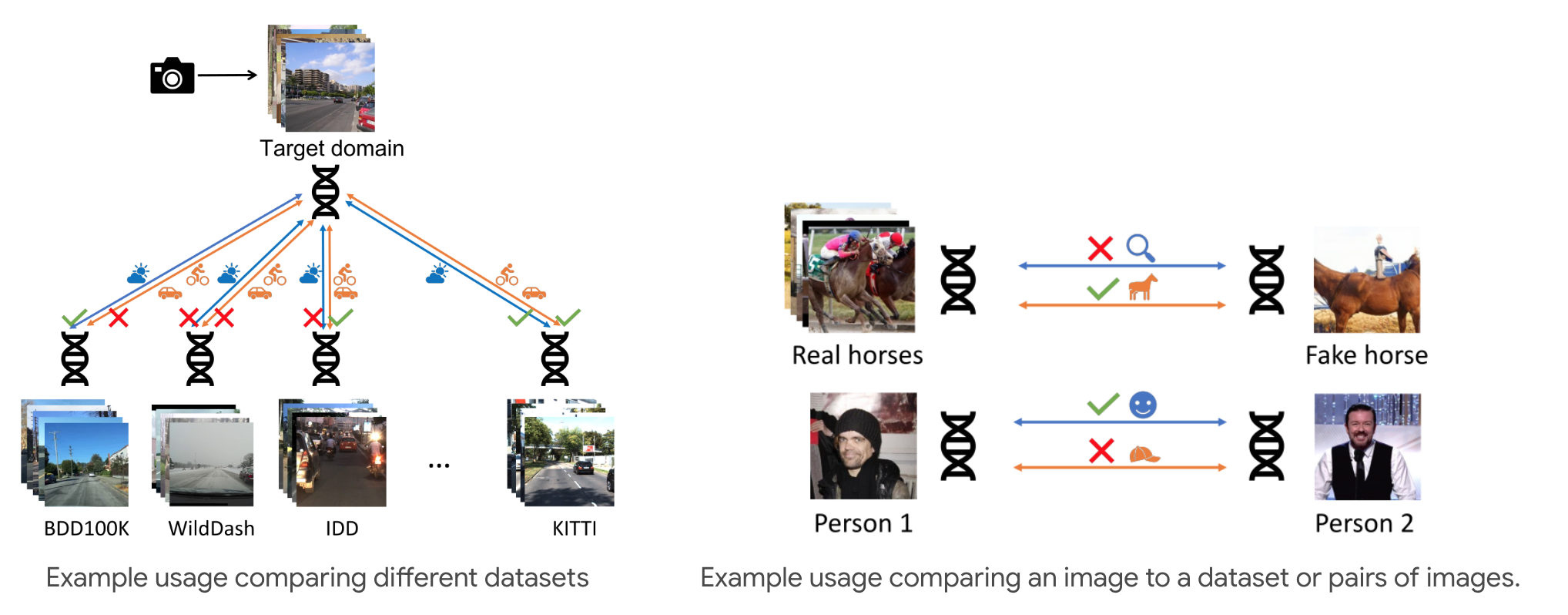
-
Box-Graph: Semantic Place Recognition and Pose Estimation from 3D LiDAR
G. Pramatarov, D. De Martini, M. Gadd, and P. Newman
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022.
[PDF]@inproceedings{pramatarov2022iros, title={{Box-Graph: Semantic Place Recognition and Pose Estimation from 3D LiDAR}}, author={Pramatarov, Georgi and De Martini, Daniele and Gadd, Matthew and Newman, Paul}, booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, year={2022} }
-
What Goes Around: Leveraging a Constant-curvature Motion Constraint in Radar Odometry
R. Aldera, M. Gadd, D. De Martini, and P. Newman
IEEE Robotics and Automation Letters (RA-L), 2022.
[PDF]@article{aldera2022ral, title={{What Goes Around: Leveraging a Constant-curvature Motion Constraint in Radar Odometry}}, author={Aldera, Roberto and Gadd, Matthew and De Martini, Daniele and Newman, Paul}, journal={IEEE Robotics and Automation Letters (RA-L)}, year={2022} }
-
Depth-SIMS: Semi-Parametric Image and Depth Synthesis
V. Musat, D. De Martini, M. Gadd, and P. Newman
IEEE International Conference on Robotics and Automation (ICRA), 2022.
[PDF]@inproceedings{musat2022icra, title={{Depth-SIMS: Semi-parametric Image and Depth Synthesis}}, author={Musat, Valentina and De Martini, Daniele and Gadd, Matthew and Newman, Paul}, booktitle={IEEE International Conference on Robotics and Automation (ICRA)}, year={2022} }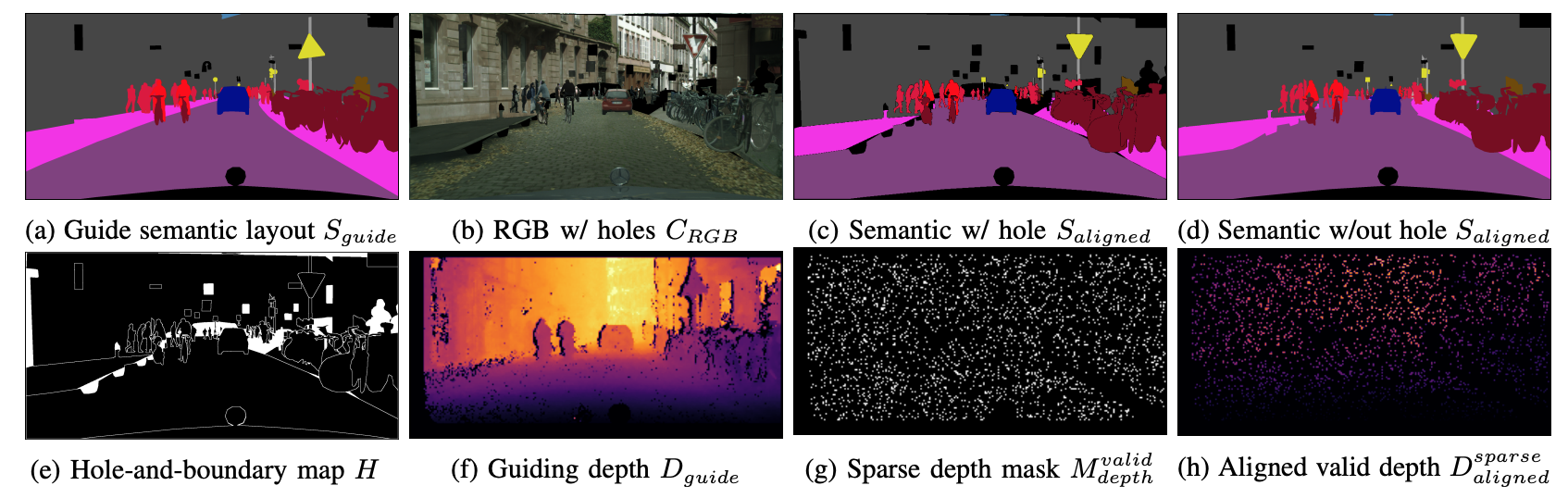
-
Fast-MbyM: Leveraging Translational Invariance of the Fourier Transform for Efficient and Accurate Radar Odometry
R. Weston, M. Gadd, D. De Martini, P. Newman, and I. Posner
IEEE International Conference on Robotics and Automation (ICRA), 2022.
[PDF]@inproceedings{weston2022fastmbym, title={{Fast-MbyM: Leveraging Translational Invariance of the Fourier Transform for Efficient and Accurate Radar Odometry}}, author={Weston, Rob and Gadd, Matthew and De Martini, Daniele and Newman, Paul and Posner, Ingmar}, booktitle={IEEE International Conference on Robotics and Automation (ICRA)}, year={2022} } }
-
Look Here: Learning Geometrically Consistent Refinement of Inverse-Depth Images for 3D Reconstruction
S. Saftescu, M. Gadd, and P. Newman
International Journal of Pattern Recognition and Artificial Intelligence (IJPRAI), 2021.
@article{saftescu2021look, title={{Look Here: Learning Geometrically Consistent Refinement of Inverse-Depth Images for 3D Reconstruction}}, author={S\u{a}ftescu, {\cb{S}}tefan and Gadd, Matthew and Newman, Paul}, journal={International Journal of Pattern Recognition and Artificial Intelligence (IJPRAI)}, year={2021} } }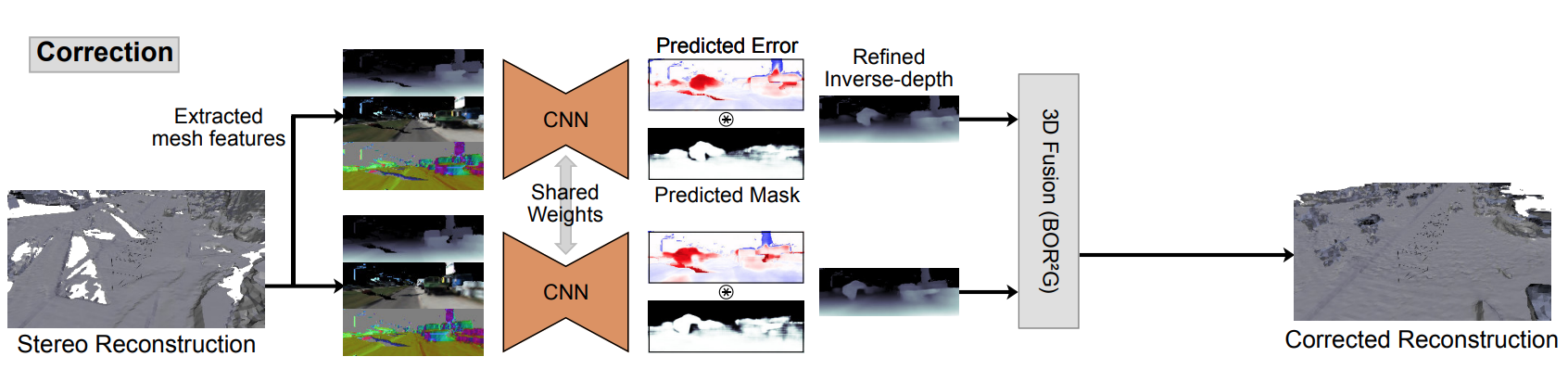
-
Contrastive Learning for Unsupervised Radar Place Recognition
M. Gadd, D. De Martini, and P. Newman
IEEE International Conference on Advanced Robotics (ICAR), December 2021.
[PDF]
-
The Oxford Road Boundaries Dataset
T. Suleymanov, M. Gadd, D. De Martini, and P. Newman
IEEE Intelligent Vehicles Symposium (IV), Workshop on 3D-Deep Learning for Automated Driving (3D-DLAD), July 2021.
[PDF]@inproceedings{suleymanov2021roadboundaries, author = {Suleymanov, Tarlan and Gadd, Matthew and De Martini, Daniele and Newman, Paul}, title = {{The Oxford Road Boundaries Dataset}}, booktitle={Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Workshop on 3D-Deep Learning for Automated Driving (3D-DLAD)}, year = {2021}, address = {Nagoya, Japan}, month = {July} }
-
Fool Me Once: Robust Selective Segmentation via Out-of-Distribution Detection with Contrastive Learning
D. Williams, M. Gadd, D. De Martini, and P. Newman
IEEE International Conference on Robotics and Automation (ICRA), 2021.
[PDF]
-
Unsupervised Place Recognition with Deep Embedding Learning over Radar Videos
M. Gadd, D. De Martini, and P. Newman
Workshop on Radar Perception for All-Weather Autonomy at the IEEE International Conference on Robotics and Automation (ICRA), 2021
[PDF]@inproceedings{gadd2021undeeprpr, title={{Unsupervised Place Recognition with Deep Embedding Learning over Radar Videos}}, author={Gadd, Matthew and De Martini, Daniele and Newman, Paul}, booktitle={Workshop on Radar Perception for All-Weather Autonomy at the IEEE International Conference on Robotics and Automation (ICRA)}, month = {May}, year={2021}, address = {Xi’an, SN, China} }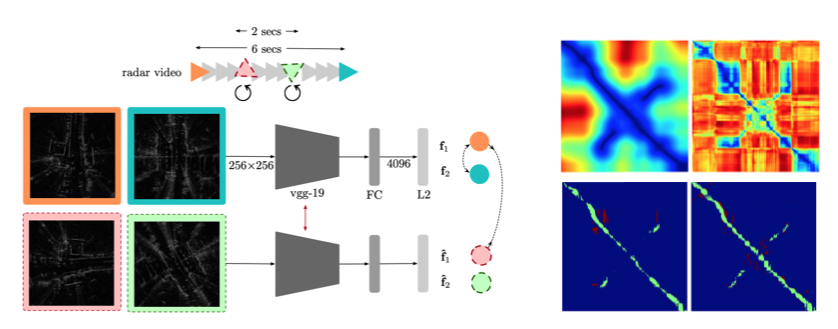
-
On the Road: Route Proposal from Radar Self-Supervised by Fuzzy LiDAR Traversability
M. Broome, M. Gadd, D. De Martini, and P. Newman
AI, vol. 1, no. 4, pp. 558–58, 2020
[PDF]@article{broome2020ontheroad, title={{On the Road: Route Proposal from Radar Self-Supervised by Fuzzy LiDAR Traversability}}, author={Broome, Michael and Gadd, Matthew, De Martini, Daniele and Newman, Paul}, journal={AI}, volume={1}, number={4}, pages={558–585}, year={2020} }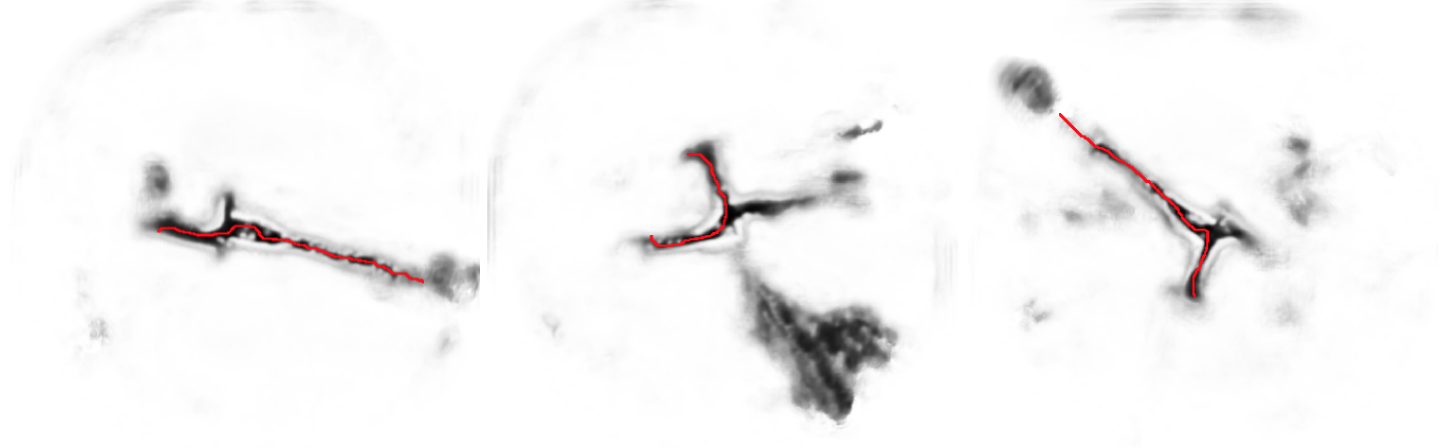
-
kRadar++: Coarse-to-fine FMCW Scanning Radar Localisation
D. De Martini, M. Gadd, and P. Newman
Sensors, Special Issue on Sensing Applications in Robotics, vol. 20, no. 21, p. 6002, 2020.
[PDF]@article{demartini2020kradar, title={{kRadar++: Coarse-to-fine FMCW Scanning Radar Localisation}}, author={De Martini, Daniele and Gadd, Matthew and Newman, Paul}, journal={Sensors, Special Issue on Sensing Applications in Robotics}, volume={20}, number={21}, pages={6002}, year={2020} }
-
Sense-Assess-eXplain (SAX): Building Trust in Autonomous Vehicles in Challenging Real-World Driving Scenarios
M. Gadd, D. De Martini, L. Marchegiani, L. Kunze, and P. Newman
IEEE Intelligent Vehicles Symposium (IV), Workshop on Ensuring and Validating Safety for Automated Vehicles (EVSAV), 2020.
[PDF]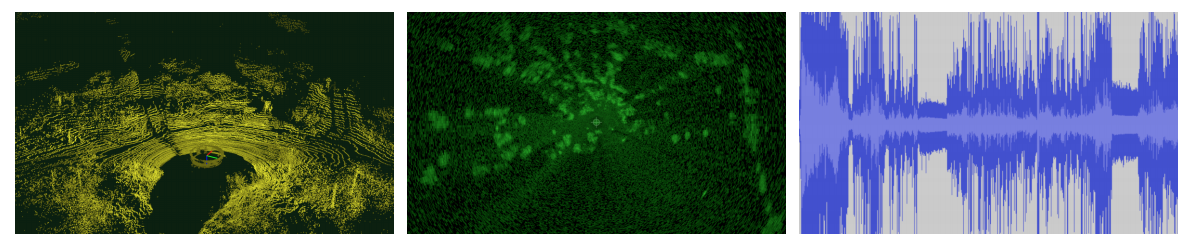
-
RSS-Net: Weakly-Supervised Multi-Class Semantic Segmentation with FMCW Radar
P. Kaul, D. De Martini, M. Gadd, and P. Newman
Proceedings of the IEEE Intelligent Vehicles Symposium (IV), 2020
[PDF]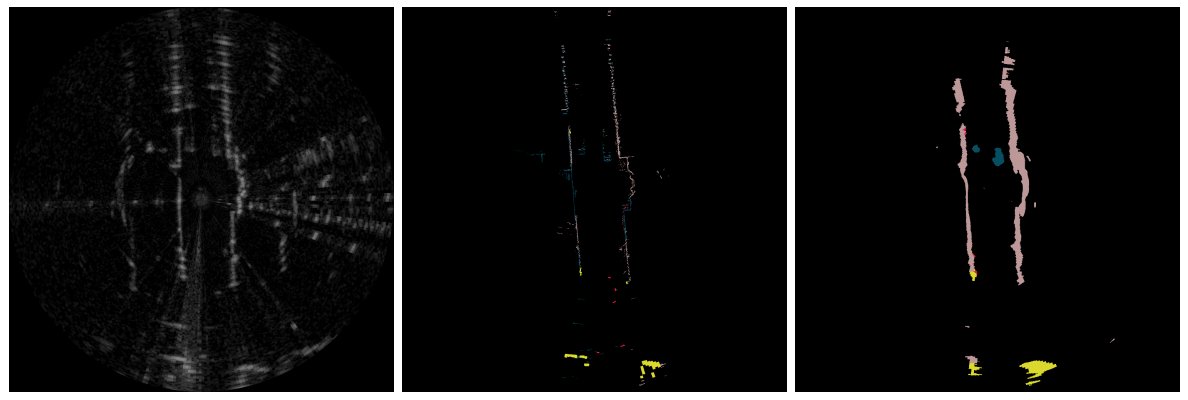
-
Keep off the Grass: Permissible Driving Routes from Radar with Weak Audio Supervision
D. Williams, D. De Martini, M. Gadd, L. Marchegiani, and P. Newman
IEEE Intelligent Transportation Systems Conference (ITSC), 2020
[PDF]
-
Kidnapped Radar: Topological Radar Localisation using Rotationally-Invariant Metric Learning
S. Saftescu, M. Gadd, D. De Martini, D. Barnes and P. Newman
IEEE International Conference on Robotics and Automation (ICRA), 2020
[PDF]
-
The Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset
D. Barnes, M. Gadd, P. Murcutt, P. Newman and I. Posner
IEEE International Conference on Robotics and Automation (ICRA), 2020
[PDF]
-
Look Around You: Sequence-based Radar Place Recognition with Learned Rotational Invariance
M. Gadd, D. De Martini, and P. Newman
IEEE/ION Position, Location and Navigation Symposium (PLANS), 2020
[PDF]
-
LiDAR Lateral Localisation Despite Challenging Occlusion from Traffic
T. Suleymanov, M. Gadd, L. Kunze, and P. Newman
IEEE/ION Position, Location and Navigation Symposium (PLANS), 2020
[PDF]
-
Real-time Kinematic Ground Truth for the Oxford RobotCar Dataset
W. Maddern, G. Pascoe, M. Gadd, D. Barnes, B. Yeomans, and P. Newman
arXiv preprint arXiv:2002.10152 2020
[PDF]
-
What Could Go Wrong? Introspective Radar Odometry in Challenging Environments
R. Aldera, D. De Martini, M. Gadd, and P. Newman
IEEE Intelligent Transportation Systems Conference (ITSC), 2019
[PDF]@inproceedings{aldera2019what, address = {Auckland, New Zealand}, author = {Aldera, Roberto, and De Martini, Daniele, and Gadd, Matthew, and Newman, Paul}, booktitle = {{IEEE Intelligent Transportation Systems Conference (ITSC)}}, month = {October}, title = {{What Could Go Wrong? Introspective Radar Odometry in Challenging Environments}}, year = {2019} }
-
The Hulk: Design and Development of a Weather-proof Vehicle for Long-term Autonomy in Outdoor Environments
S. Kyberd, J. Attias, P. Get, P. Murcutt, C. Prahacs, M. Towlson, S. Venn, A. Vasconcelos, M. Gadd, D. De Martini, and P. Newman
International Conference on Field and Service Robotics (FSR), 2019
[PDF]@inproceedings{kyberd2019hulk, address = {Tokyo, Japan}, author = {Kyberd, Stephen, and Attias, Jonathan, and Get, Peter, and Murcutt, Paul, and Prahacs, Chris, and Towlson, Matthew, and Venn, Simon, and Vasconcelos, Andreia, and Gadd, Matthew, and De Martini, Daniele, and Newman, Paul}, booktitle = {{International Conference on Field and Service Robotics (FSR)}}, month = {August}, title = {{The Hulk: Design and Development of a Weather-proof Vehicle for Long-term Autonomy in Outdoor Environments}}, year = {2019} }
-
Fast Radar Motion Estimation with a Learnt Focus of Attention using Weak Supervision
R. Aldera, D. De Martini, M. Gadd, and P. Newman
IEEE International Conference on Robotics and Automation (ICRA)2019
[PDF]
-
The 2016 UK Space Agency Mars Utah Rover Field Investigation (MURFI)
M. R. Balme, M. C. Curtis-Rouse, S. Banham, D. Barnes, R. Barnes, A. Bauer, C. C. Bedford, J. C. Bridges, F. E. G. Butcher, P. Caballo-Perucha, A. Caldwell, A. J. Coates, C. Cousins, J. M. Davis, J. Dequaire, P. Edwards, P. Fawdon, K. Furuya, M. Gadd, A. Griffiths, P. M. Grindrod, M. Gunn, S. Gupta, R. Hansen, J. K. Harris, L. J. Hicks, J. Holt, B. Huber, C. Huntly, I. Hutchinson, L. Jackson, S. Kay, S. Kyberd, H. N. Lerman, M. McHugh, W. J. McMahon, J. P. Muller, T. Ortner, G. Osinski, G. Paar, L. J. Preston, S. P. Schwenzer, R. Stabbins, Y. Tao, C. Traxler, S. Turner, L. Tyler, S. Venn, H. Walker, T. Wilcox, J. Wright, B. Yeomans
Planetary and Space Science 165, 31-56 (2019)
[PDF]@article{balme2019the2016, title = {{The 2016 UK Space Agency Mars Utah Rover Field Investigation (MURFI)}}, author = {M. R. Balme and M. C. Curtis-Rouse and S. Banham and D. Barnes and R. Barnes and A. Bauer and C. C. Bedford and J.C. Bridges and F. E. G. Butcher and P. Caballo and A. Caldwell and A. J. Coates and C. Cousins and J. M. Davis and J. Dequaire and P. Edwards and P. Fawdon and K. Furuya and M. Gadd and P. Get and A. Griffiths and P. M. Grindrod and M. Gunn and S. Gupta and R. Hansen and J. K. Harris and L. J. Hicks and J. Holt and B. Huber and C. Huntly and I. Hutchinson and L. Jackson and S. Kay and S. Kyberd and H. N. Lerman and M. McHugh and W. J. McMahon and J. P. Muller and T. Ortner and G. Osinski and G. Paar and L. J. Preston and S. P. Schwenzer and R. Stabbins and Y. Tao and C. Traxler and S. Turner and L. Tyler and S. Venn and H. Walker and T. Wilcox and J. Wright and B. Yeomans}, year = {2019}, pages = {(Early Access)}, journal = {Planetary And Space Science}, url = {http://oro.open.ac.uk/58259/} }
-
MURFI 2016 – From Cars to Mars: Applying Autonomous Vehicle Navigation Methods To a Space Rover Mission
B. Yeomans, H. Porav, M. Gadd, D. Barnes, J. Dequaire, T. Wilcox, S. Kyberd, S. Venn, and P. Newman
Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), Leiden, Netherlands, 2017
[PDF]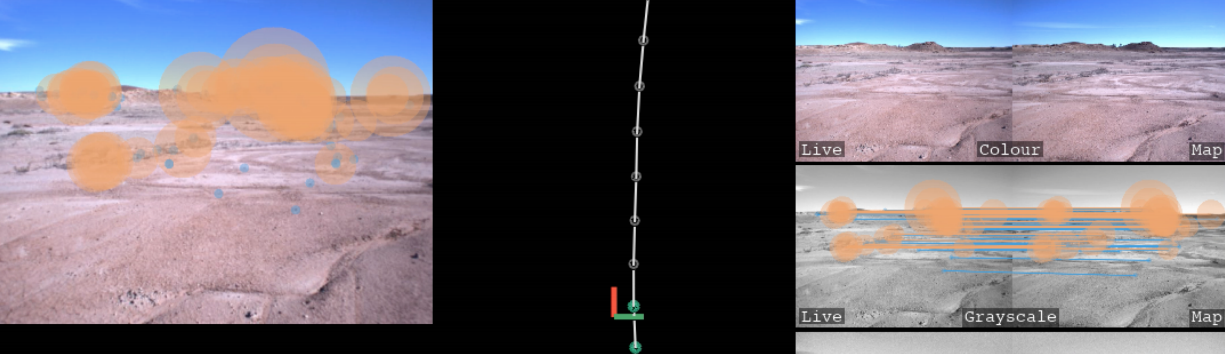
-
UK Space Agency “Mars Utah Rover Field Investigation 2016" (MURFI 2016): Overview of mission, aims, progress
M. R. Balme, M. C. Curtis-Rouse, S. Banham, D. Barnes, R. Barnes, A. Bauer, C. Bedford, J. Bridges, F. E. G. Butcher, P. Caballo, A. Caldwell, A. Coates, C. Cousins, J. Davis, J. Dequaire, P. Edwards, P. Fawdon, K. Furuya, M. Gadd, P. Get, A. Griffiths, P. M. Grindrod, M. Gunn, S. Gupta, R. Hansen, J. K. Harris, J. Holt, B. Huber, C. Huntly, I. Hutchinson, L. Jackson, S. Kay, S. Kybert, H. N. Lerman, M. McHugh, W. McMahon, J. P. Muller, G. Paar, L. J. Preston, S. Schwenzer, R. Stabbins, Y. Tao, C Traxler, S. Turner, L. Tyler, S. Venn, H. Walker, J. Wright, and B. Yeomans
Lunar, Planetary Science Conference, 2017
[PDF]@inproceedings{balme2017murfi, booktitle = {48th Lunar and Planetary Science Conference}, month = {March}, title = {{UK Space Agency Mars Utah Rover Field Investigation 2016 (MURFI 2016): Overview of mission, aims and progress}}, author = {M. R. Balme and M. C. Curtis-Rouse and S. Banham and D. Barnes and R. Barnes and A. Bauer and C. Bedford and J. Bridges and F. E. G. Butcher and P. Caballo and A. Caldwell and A. Coates and C. Cousins and J. Davis and J. Dequaire and P. Edwards and P. Fawdon and K. Furuya and M. Gadd and P. Get and A. Griffiths and P. M. Grindrod and M. Gunn and S. Gupta and R. Hansen and J. K. Harris and J. Holt and B. Huber and C. Huntly and I. Hutchinson and L. Jackson and S. Kay and S. Kybert and H. N. Lerman and M. McHugh and W. McMahon and J. P. Muller and G. Paar and L. J. Preston and S. Schwenzer and R. Stabbins and Y. Tao and C Traxler and S. Turner and L. Tyler and S. Venn and H. Walker and J. Wright and B. Yeomans}, year = {2017} }
-
Checkout My Map: Version Control for Fleetwide Visual Localisation
M. Gadd and P. Newman
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016
[PDF]@inproceedings{gadd2016checkout, Address = {Daejeon, South Korea}, Author = {Gadd, Matthew and Newman, Paul}, Booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, Month = {October}, Year = {2016}, pages = {5729-5736}, month = {10}, Title = {{Checkout My Map: Version Control for Fleetwide Visual Localisation}}, Pdf = {http://www.robots.ox.ac.uk/~mobile/Papers/2016IROS_gadd.pdf} }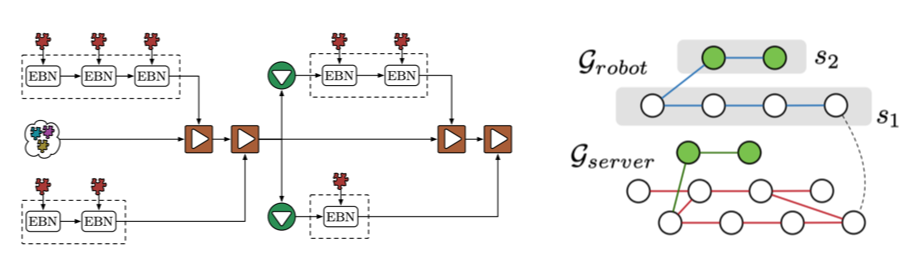
-
A Framework for Infrastructure-Free Warehouse Navigation
M. Gadd and P. Newman
IEEE International Conference on Robotics and Automation (ICRA), 2015
[PDF]@inproceedings{gadd2015warehouse, Address = {Seattle, WA, USA}, Author = {Gadd, Matthew and Newman, Paul}, Booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)}, Month = {May}, Pdf = {http://www.robots.ox.ac.uk/~mobile/Papers/2015ICRA_gadd.pdf}, Title = {{A Framework for Infrastructure-Free Warehouse Navigation}}, Year = {2015}, Pages = {3271-3278} }